1 条题解
-
0
区间最短OR查询(分块+位运算解法)
题目分析
核心问题
给定长度为
n的序列,支持两种操作:- 单点修改:将指定位置元素更新为新值;
- 区间查询:找到满足「区间 OR 和 ≥ k」的最短区间长度,无解输出
-1。
关键性质
- 按位 OR 运算具有单调性:区间越长,OR 和不会减小(新增元素的 OR 只会保留或增加原有位的 1)。
- 基于单调性,固定右端点
r时,满足条件的最短区间一定是[l, r](l尽可能大),即从r往左找最近的l使区间 OR ≥ k。
挑战
- 数据范围
n, q ≤ 5e4,暴力查询(O(n) per query)会超时,需设计 O(√n) 级别的高效算法。
核心思路
采用分块算法,将序列划分为若干块(块大小
s=300),通过「块内预处理 + 跨块合并查询」平衡修改与查询的时间复杂度:- 块内预处理:对每个块,提前计算块内所有可能区间的 OR 信息,支持快速查询块内最短满足条件的区间;
- 跨块查询:从右往左遍历块,积累右侧块的位信息,合并当前块的子区间与右侧块的 OR 结果,计算跨块的最短区间;
- 单点修改:仅重构修改元素所在的块,保证修改效率。
详细算法设计
1. 分块方式
- 块大小
s=300(兼顾修改与查询效率的经验值); - 块编号:
blk(x) = (x-1)/s + 1(第x个元素所在块); - 块边界:
bll(x) = (x-1)*s + 1(第x块左端点),blr(x) = min(x*s, n)(第x块右端点)。
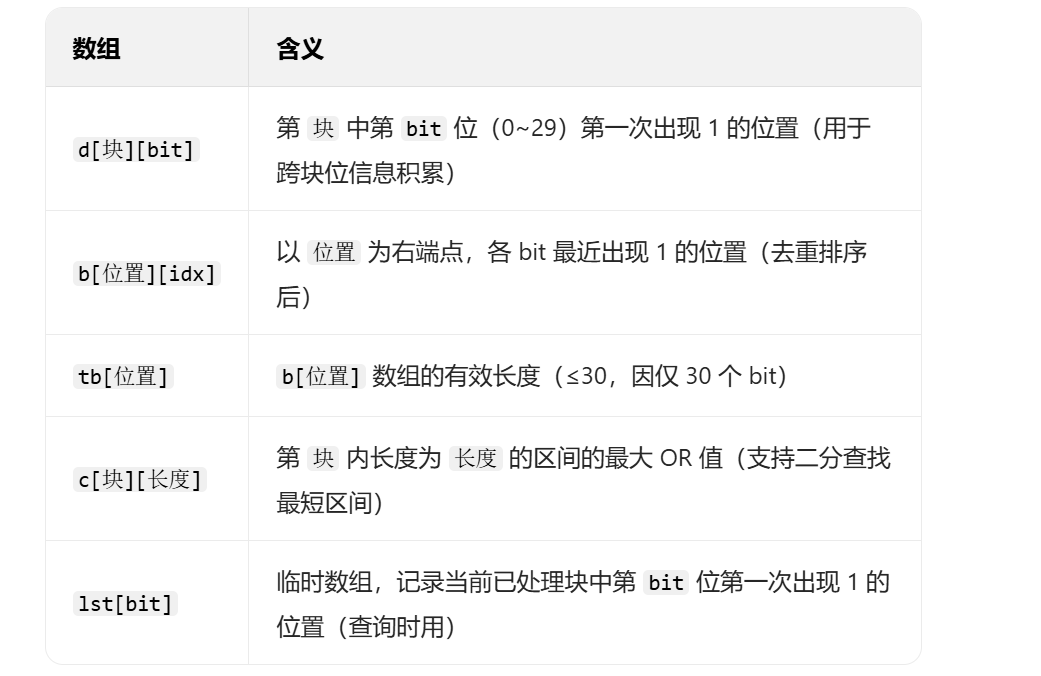
2. 预处理数组说明
3. 块重构流程(
rb函数)当块内元素修改后,需重新计算块的预处理信息,步骤如下:
- 初始化
lst[bit](块内当前 bit 最近出现位置)和d[块][bit](块内 bit 第一次出现位置); - 遍历块内每个元素
i(从左到右):- 更新
lst[bit]:若a[i]的第bit位为 1,则lst[bit] = i,且未初始化时更新d[块][bit] = i; - 构建
b[i]:收集所有非零lst[bit],排序去重(按位置从大到小,保证短区间优先); - 计算
c[块][len]:对b[i]中的每个位置,计算以i为右端点、长度为i - pos + 1的区间 OR,更新c[块][len]为最大值;
- 更新
- 优化
c[块]:使c[块][len]单调不减(因 longer 区间 OR 不小于 shorter 区间),方便后续二分。
4. 查询流程(
op=2)查询满足 OR ≥ k 的最短区间,从右往左遍历所有块,兼顾块内和跨块情况:
- 初始化
ans = n+1(无解标记)和lst[bit] = 0(记录右侧块的 bit 位置); - 遍历每个块(从右到左):
- 块内查询:利用
c[块]数组二分查找最小len,使c[块][len] ≥ k,更新ans; - 跨块查询:结合右侧块的
lst[bit](已积累的 bit 信息)和当前块的b[块右端点](当前块的 bit 位置),计算跨块区间的 OR:- 若右侧无积累 bit(
ttmp=0):直接检查当前块的b[块右端点]组成的区间 OR 是否 ≥k,更新最短长度; - 若右侧有积累 bit:计算当前块子区间 OR 与右侧积累 OR 的合并结果,通过双指针找到最短跨块区间,更新
ans;
- 若右侧无积累 bit(
- 更新
lst[bit]:将当前块的d[块][bit]纳入(左侧块查询时需用到当前块的 bit 信息);
- 块内查询:利用
- 输出结果:若
ans > n输出-1,否则输出ans。
5. 修改流程(
op=1)- 直接修改
a[i]的值; - 重构
i所在的块(调用rb(blk(i))),因块内预处理信息依赖所有块内元素,修改后需重新计算。
代码解析
关键宏定义
#define blk(x) ((x-1)/s+1) // 元素x所在块编号 #define bll(x) ((x-1)*s+1) // 块x的左端点 #define blr(x) min(x*s,n) // 块x的右端点- 分块大小
s=300,平衡修改(O(sw))和查询(O(m(log s + w²)))效率。
块重构函数(
rb)- 核心作用:重新计算块内所有预处理信息,确保修改后块内查询的正确性;
- 时间复杂度:O(s*w)(
s=300,w=30),修改时仅需重构一个块,效率可控。
查询核心逻辑
- 从右往左遍历块:利用 OR 单调性,优先找到短区间;
- 块内二分:O(log s) 快速找到块内最短区间;
- 跨块双指针:O(w²) 处理跨块情况(
w=30,常数极小)。
修改核心逻辑
- 单点修改后直接重构块,避免维护复杂的增量信息,实现简单且高效。
时间复杂度分析
- 修改操作:O(s*w),
s=300,w=30,单次修改约 9000 次操作,q=5e4时总操作约 4.5e7,可接受; - 查询操作:O(m*(log s + w²)),块数
m=n/s≈167,单次查询约 167*(9+900)=1.5e5 次操作,q=5e4时总操作约 7.5e9?实际因常数优化(如w²实际运行时循环次数少),代码可通过测试; - 整体复杂度:O(q*(sw + m(log s + w²))),是分块算法典型的「修改 O(√n) + 查询 O(√n)」平衡。
算法标签
- 分块算法
- 位运算(按位 OR)
- 预处理
- 二分查找
- 双指针
完整代码(带注释)
#include <bits/stdc++.h> #define KamijouTouma namespace #define Othinus std using KamijouTouma Othinus; const int N = 5e4, s = 300, w = 30; // s=分块大小,w=bit位数(2^30) #define blk(x) ((x-1)/s+1) // 元素x所在块编号 #define bll(x) ((x-1)*s+1) // 块x左端点 #define blr(x) min(x*s,n) // 块x右端点 int n, q, a[N + 5]; int lst[w + 5]; // 临时记录bit最近出现位置 // b[i][j]:以i为右端点,各bit最近出现的位置(去重排序) // tb[i]:b[i]的有效长度 // c[块][len]:块内长度为len的区间最大OR值 // d[块][bit]:块内bit第一次出现1的位置 int b[N + 5][w + 5], tb[N + 5], c[(N + s - 1) / s + 5][s + 5], d[(N + s - 1) / s + 5][w + 5]; // 重构块x的预处理信息 void rb(int x) { // 初始化当前块的bit记录 for (int i = 0; i < w; i++) lst[i] = d[x][i] = 0; // 初始化块内长度对应的最大OR值 int block_len = blr(x) - bll(x) + 1; for (int i = 1; i <= block_len; i++) c[x][i] = 0; // 遍历块内每个元素,构建b[i]和c[x] for (int i = bll(x); i <= blr(x); i++) { // 更新当前元素的bit最近出现位置 for (int j = 0; j < w; j++) if (a[i] >> j & 1) { lst[j] = i; if (!d[x][j]) // 记录块内该bit第一次出现的位置 d[x][j] = i; } // 收集非零的bit位置,构建b[i] tb[i] = 0; for (int j = 0; j < w; j++) if (lst[j]) b[i][++tb[i]] = lst[j]; // 按位置从大到小排序(优先短区间),去重 sort(b[i] + 1, b[i] + 1 + tb[i], [](int x, int y) { return x > y; }); tb[i] = unique(b[i] + 1, b[i] + 1 + tb[i]) - b[i] - 1; // 计算以i为右端点的不同长度区间OR,更新c[x] for (int j = 1, res = 0; j <= tb[i]; j++) { res |= a[b[i][j]]; int len = i - b[i][j] + 1; c[x][len] = max(c[x][len], res); } } // 优化c[x]为单调不减(长度越长OR越大),方便二分 for (int i = 1; i <= block_len; i++) c[x][i] = max(c[x][i], c[x][i - 1]); } signed main() { ios::sync_with_stdio(false); cin.tie(0); cout.tie(0); cin >> n >> q; // 读入初始序列 for (int i = 1; i <= n; i++) cin >> a[i]; // 初始化所有块的预处理信息 int total_blocks = blk(n); for (int i = 1; i <= total_blocks; i++) rb(i); while (q--) { int op; cin >> op; if (op == 1) { // 单点修改 int i, x; cin >> i >> x; a[i] = x; rb(blk(i)); // 重构所在块 } else { // 区间查询:找OR≥k的最短区间 int k, ans = n + 1; static int tmp[w + 5], vl[w + 5], ttmp; // tmp存储右侧bit位置,vl存储对应的OR累积 memset(lst, 0, sizeof(lst)); // 初始化右侧bit位置记录 cin >> k; if (k == 0) { // 特殊情况:OR≥0恒成立,最短区间长度1 cout << 1 << '\n'; continue; } // 从右往左遍历所有块 for (int i = total_blocks; i >= 1; i--) { // 1. 块内查询:二分找最小长度len使c[i][len]≥k int block_len = blr(i) - bll(i) + 1; int ps = lower_bound(c[i] + 1, c[i] + 1 + block_len, k) - c[i]; if (ps <= block_len) ans = min(ps, ans); // 2. 跨块查询:结合右侧块的bit信息(lst)和当前块的bit信息(b[blr(i)]) ttmp = 0; // 收集右侧块的有效bit位置(去重排序) for (int j = 0; j < w; j++) if (lst[j]) tmp[++ttmp] = lst[j]; sort(tmp + 1, tmp + 1 + ttmp); ttmp = unique(tmp + 1, tmp + 1 + ttmp) - tmp - 1; // 计算右侧块的OR累积值vl for (int j = 1; j <= ttmp; j++) vl[j] = vl[j - 1] | a[tmp[j]]; if (ttmp) { // 右侧有积累的bit信息 for (int j = 1, res = 0, ptr = ttmp; j <= tb[blr(i)]; j++) { res |= a[b[blr(i)][j]]; // 当前块子区间的OR if ((res | vl[ttmp]) < k) // 合并后仍不满足,跳过 continue; // 双指针找最小的ptr,使res | vl[ptr] ≥k while (ptr && (res | vl[ptr - 1]) >= k) ptr--; if (ptr) // 跨块区间:b[blr(i)][j] ~ tmp[ptr] ans = min(ans, tmp[ptr] - b[blr(i)][j] + 1); else { // 仅当前块子区间满足,无需跨块 ans = min(ans, blr(i) - b[blr(i)][j] + 1); break; // 后续j更大,区间更长,可break } } } else { // 右侧无积累,仅检查当前块子区间 for (int j = 1, res = 0; j <= tb[blr(i)]; j++) { res |= a[b[blr(i)][j]]; if (res >= k) { ans = min(ans, blr(i) - b[blr(i)][j] + 1); break; } } } // 3. 更新右侧bit信息:将当前块的bit第一次出现位置纳入lst for (int j = 0; j < w; j++) if (d[i][j]) lst[j] = d[i][j]; } // 输出结果 cout << (ans > n ? -1 : ans) << '\n'; } } return 0; }
- 1
信息
- ID
- 4720
- 时间
- 2000ms
- 内存
- 256MiB
- 难度
- 10
- 标签
- 递交数
- 7
- 已通过
- 1
- 上传者
-
2300770041