1 条题解
-
0
城市漫步——题解:
问题分析
这道题描述了一个由二进制串命名的城市网络,本质上是一个n维超立方体的图模型(示例):
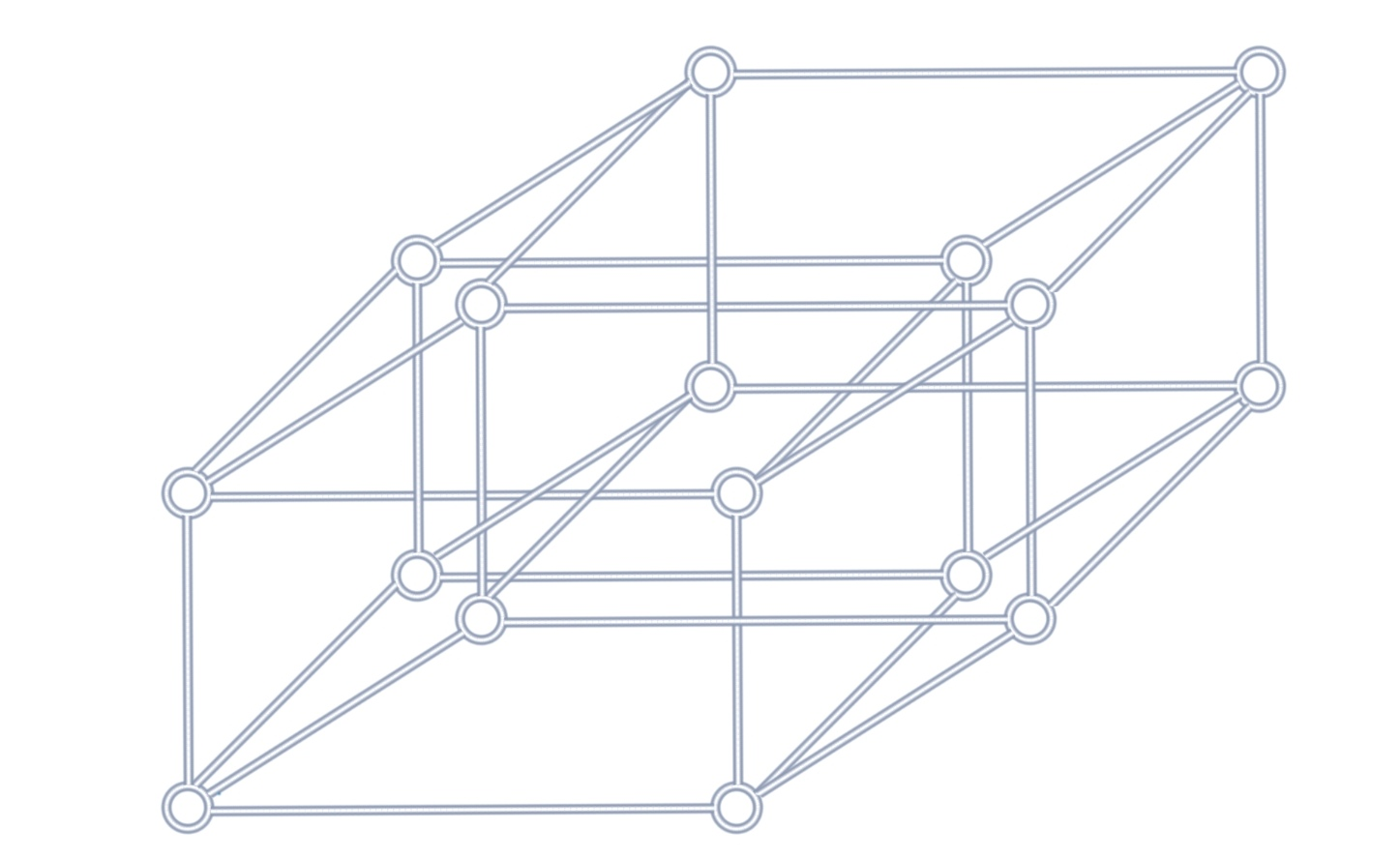
- 每个节点是一个n位二进制串(共个可能节点)
- 其中k个节点是禁止访问的(不是城市)
- 边连接汉明距离为1的节点(即仅有一位不同的二进制串)
问题:判断两个节点s和t在删除禁止节点后的图中是否连通。
关键约束:,但可能达到,无法存储所有节点。
算法核心思想
双向BFS + 剪枝策略
虽然总节点数可能极大(),但观察发现:
- 禁止节点数,相对较少
- 从起点s出发,能访问的节点数受禁止节点限制
- 如果从s能到达的节点数 > ,说明搜索空间很大,很可能连通
算法步骤
- 从s开始BFS,标记访问过的节点
- 如果遇到t,直接返回连通
- 如果访问节点数 > ,停止搜索(认为连通)
- 同样从t开始BFS验证
- 只有两个方向都"连通"才输出TAK
代码深度解析
核心数据结构:自定义哈希表
const int mod = 1234577, maxk = 5e6 + 10; struct Hash_Map { int nxt[maxk], cnt[maxk], head[mod + 100], tot; ll val[maxk]; void clear() { memset(head, 0, sizeof(head)); tot = 0; } int Hash(LL x) { return x % mod; } void ins(LL x) { int u = Hash(x); for (int i = head[u]; i; i = nxt[i]) { if (val[i] == x) { cnt[i]++; return; } } // 链地址法解决哈希冲突 tot++; val[tot] = x, nxt[tot] = head[u]; cnt[tot] = 1; head[u] = tot; } bool find(LL x) { int u = Hash(x); for (int i = head[u]; i; i = nxt[i]) { if (val[i] == x) return true; } return false; } };设计优势:
- 避免
unordered_set的开销 - 链地址法处理哈希冲突
- 同时记录禁止节点和已访问节点
二进制串高效处理
ll trans(char *str) { ll res = 0; int len = strlen(str); ll k = 1; for (int i = len - 1; i >= 0; i--) { if (str[i] == '1') res += k; k <<= 1; // 位运算快速计算 } return res; }将二进制字符串转换为长整型,便于存储和位运算。
BFS核心实现与剪枝
int bfs(ll x, ll y) { int cnt = 0; if (x == y) return 1; // 起点即终点 hh.clear(); // 将禁止节点加入哈希表 for (int i = 1; i <= k; i++) { hh.ins(a[i]); } queue<ll> q; q.push(x); cnt++; hh.ins(x); while (!q.empty()) { ll u = q.front(); q.pop(); // 生成所有邻居节点(改变每一位) for (int i = 0; i < n; i++) { ll v = (u ^ (1ll << i)); // 位运算翻转第i位 if (v == y) return 1; // 找到终点 if (hh.find(v)) continue; // 禁止节点或已访问 cnt++; // 关键剪枝:访问节点数超过n*k认为连通 if (cnt > 1ll * n * k) return 1; q.push(v); hh.ins(v); } } return 0; }主函数:双向验证
int main() { scanf("%lld%lld", &n, &k); scanf("%s", tmp); s = trans(tmp); scanf("%s", tmp); t = trans(tmp); // 读入禁止节点 for (int i = 1; i <= k; i++) { scanf("%s", tmp); a[i] = trans(tmp); } // 双向BFS验证 int res = bfs(s, t); // 从s到t if (!res) { cout << "NIE"; return 0; } res &= bfs(t, s); // 从t到s if (!res) { cout << "NIE"; return 0; } cout << "TAK"; return 0; }关键优化点详解
1. 剪枝的数学原理
if (cnt > 1ll * n * k) return 1;为什么这个剪枝有效?
- 每个禁止节点最多影响n个邻居
- 如果搜索超过个节点,说明禁止节点形成的障碍很"稀疏"
- 在n维超立方体中,稀疏障碍很难完全隔离大空间
- 基于图论中的等周不等式原理
2. 双向BFS的优势
分别从s和t出发验证:
- 防止单向被大量禁止节点阻挡的情况
- 在连通分量大小差异较大时更高效
- 提高算法在边界情况下的鲁棒性
3. 位运算优化
ll v = (u ^ (1ll << i)); // 翻转第i位使用异或运算快速生成相邻节点,避免字符串操作。
复杂度分析
- 时间复杂度:最坏,受搜索节点数限制
- 空间复杂度:,存储访问节点和禁止节点
- 哈希操作:平均的插入和查询
学习要点总结
- 状态压缩技巧:用整数表示二进制串,便于存储和运算
- 邻域生成优化:通过位运算快速生成图邻居
- 自定义哈希表:针对特定问题优化存储结构
- 启发式剪枝:利用图结构特性设置合理阈值
- 双向搜索策略:提高算法完备性和效率
- 稀疏图处理:在无法存储完整图时仍能解决问题
算法适用场景
这种解法适用于:
- 状态空间极大但障碍相对稀疏的图搜索问题
- 具有规则邻接关系的图结构(如网格图、超立方体等)
- 需要判断连通性但无法构建完整图的情况
- 1